Robotic finger prosthetics represent a remarkable fusion of biology and technology, offering individuals with amputations the chance to regain lost dexterity and a sense of normalcy. This concise guide delves into how these prosthetics mimic natural movements, the role that cutting-edge tech plays in advancing their functionality, and the practical benefits users can expect in their daily lives.
Key Takeaways
- Robotic finger prosthetics have evolved from simple aesthetic replacements to highly sophisticated systems utilizing advanced technology such as 3D printing, machine learning, and sensory feedback for improved dexterity and control.
- Actuation systems, sensors, feedback mechanisms, and intuitive control systems are key components in robotic finger prosthetics, vital for achieving movements that closely emulate natural hand functions and improving the user’s interaction with their environment.
- Although robotic finger prosthetics significantly enhance the quality of life for their users, challenges such as high costs, durability, maintenance, and the need for customization remain barriers to their widespread adoption and acceptance.
The Evolution of Robotic Finger Prosthetics
The evolution of robotic prosthetics, from rudimentary cosmetic enhancements to sophisticated hand prosthesis systems, has been marked by continuous innovation. This progress was propelled by merging technology with an advanced understanding of human anatomy and biomechanics.
The combined influence of these factors has paved the way for a new breed of robotic prosthesis that surpasses its predecessors in functionality and aesthetic appeal. From the MIT-developed inflatable robotic hand that provides real-time tactile control to prosthetics that use muscle signals for intuitive control, the progress in this field has been remarkable. This significant advancement is attributed to pioneers like Cindy Chestek and Professor Xuanhe Zhao, who tirelessly expanded the achievable boundaries in this field.
Early Attempts at Finger Prosthetics
Revisiting the origins of prosthetics reveals that initial attempts were starkly different from today’s advanced robotic hands. The first documented efforts, dating back to 950–710 B.C., were more focused on aesthetics, with the aim of replicating the appearance of a natural limb. In fact, materials such as wood, metal, and leather were the primary constituents of these early prosthetics, a far cry from the advanced synthetic materials used today.
Despite their limitations, these early versions were not without functionality. The 16th-century spring-loaded hand created by Ambroise Paré, for instance, allowed for gripping and holding capabilities. Yet, they were constrained by inadequate mobility, control, and resilience, among other challenges. The emphasis on aesthetics was driven by a strong desire to enable wearers to seamlessly blend in and minimize attention to their prostheses, including the upper arm. This pursuit of natural appearance laid the groundwork for the development of anthropomorphic robot hand technology that we see today.
Advancements in Technology
The advent of technology marked a new epoch in the development of robotic finger prosthetics. The advent of 3D printing technology, for instance, revolutionized the production process. It enabled the creation of personalized models based on 3D CAD designs, ensuring precise and accurate fabrication of prosthetics tailored to fit the specific anatomical needs of individuals, all at a more affordable cost.
Moreover, the incorporation of machine learning significantly enhanced the functionality of these myoelectric prostheses. It improved control systems, enabling faster finger velocities and allowing the prosthetics to sense and respond to the touch and texture of objects. The use of biomechanical models and EMG control signals, coupled with significant progress in brain-controlled movements, facilitated the development of prosthetics that closely emulate natural finger movements, providing users with enhanced precision and more intuitive control.
These technological advancements have led to the development of robotic fingers, including the index finger, that mirror the natural ones in appearance and texture, signifying a major advancement in the realism and agility of prosthetics.
Key Components of Robotic Finger Prosthetics
The essence of robotic finger prosthetics is encapsulated in their key components: actuation systems, sensors and feedback mechanisms, and control systems. These components work synergistically to replicate the intricate maneuvers of the human hand. They are the cogs in the machine, each playing a vital role in making robotic fingers an extension of the human body, rather than an external device.
Actuation systems generate movement and force in prosthetic fingers using motors or other mechanical components. Sensors and feedback mechanisms provide the user with crucial sensory information about their environment and the position of their prosthetic fingers. Finally, control systems facilitate the intuitive operation of prosthetic fingers, commonly using signals from the user’s muscles or nerves. Together, these components form a seamless interface between the human body and the robotic prosthesis, enabling the user to perform a diverse range of tasks with improved dexterity and control.
Actuation Systems
Actuation systems are the core of robotic finger prosthetics. They are responsible for generating the movement and force, giving life to the mechanical structure. From Peano-HASEL actuators to pneumatic actuation, a variety of systems are employed in robotic finger prosthetics, each contributing its unique capabilities to the overall function of the prosthetic.
Electric motors, for instance, facilitate the movement of robotic finger prosthetics by actuating the fingers, enabling articulated movements with the required motion and dexterity. Similarly, hydraulic and pneumatic actuation systems operate by utilizing hydraulic cylinders and pneumatic actuators respectively, enabling efficient opening and closing of the fingers with significant force.
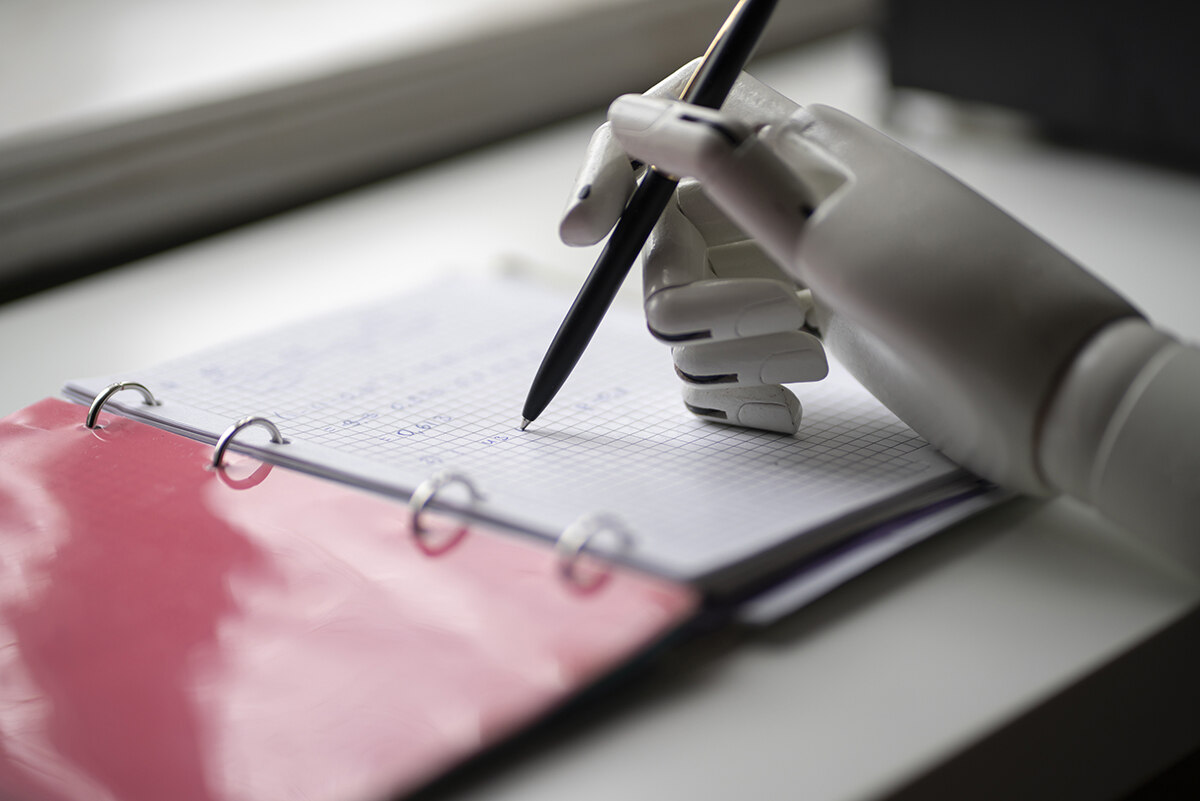
These systems are essential to the functionality of prosthetic fingers, allowing users to perform tasks like grasping objects with enhanced dexterity and control, typing on a keyboard, holding a pen or pencil, picking up small objects, and gripping and manipulating tools. The tasks performed by these prosthetic fingers greatly improve the quality of life for users.
Sensors and Feedback
Sensors and feedback mechanisms form the sensory network of robotic finger prosthetics. They provide critical information about the environment and the position of the prosthetic fingers, enabling more natural and accurate movements. A variety of sensors, such as multifunctional flexible tactile sensors, are integrated into these prosthetics. They detect the environment and provide precise feedback on touch, pressure, and other factors, enhancing the control and precision of the prosthetic’s movements.
Tactile feedback can be delivered through pneumatic wristbands with independent actuators that deliver haptic feedback using vibration and pressure, or by using multiple sensing areas that offer feedback through a compliant surface on distal regions of the phalanges. The integration of these sophisticated feedback mechanisms significantly enhances the user’s ability to perform various tasks with the prosthetic fingers.
Control Mechanisms
In robotic finger prosthetics, control mechanisms serve as the link between the user’s intention and the prosthetic’s response. They translate signals from the user’s own muscles or nerves into movements of the prosthetic fingers. Peripheral nerves controlled by the human brain, electromyography (EMG) signals, and tactile control are among the commonly utilized control systems in robotic finger prosthetics.
These systems facilitate intuitive and precise finger movements by producing signals for finer movements and utilizing real-time, closed-loop control, thereby improving the overall user experience. By learning and adapting to the user’s unique movement patterns, these control systems enable a high degree of personalization, resulting in a more natural and organic utilization of the prosthesis.
Real-Life Applications and Benefits

Robotic finger prosthetics extend beyond engineering marvels to have significant real-world impact. From improving the quality of life for amputees to enhancing the dexterity and functionality in daily tasks, the benefits of these prosthetics extend far beyond their mechanical prowess.
These prosthetics, including prosthetic arms, and prosthetic hands options, can potentially revolutionize individuals’ daily lives by facilitating a diverse range of activities effortlessly. Whether it’s fastening a belt, striking up a handshake, or petting a beloved pet, robotic prostheses allow users to navigate their world with enhanced autonomy and independence.
Improved Quality of Life
Robotic finger prosthetics substantially influence the quality of life for amputees. These devices enable a higher degree of independence in daily tasks, thereby boosting the user’s confidence and self-esteem. The ability to perform everyday activities with ease significantly enhances the user’s functional ability, leading to an overall improvement in quality of life.
Moreover, the psychological benefits of using robotic finger prosthetics cannot be overstated. Some of these benefits include:
- Improved body image
- Decreased mental exertion
- A sense of reintegration and embodiment of the prosthetic limb
- Improved psychological well-being
- The ability to interact with the world in a way that feels natural
- Increased overall satisfaction and well-being
Enhanced Dexterity and Functionality
Robotic finger prosthetics offer a significant enhancement in dexterity and functionality. These devices enable users to:
- Grasp objects
- Play musical instruments
- Type on a keyboard
- Write with a pen or pencil
- Use tools and utensils
The advanced functionality is a testament to the power of innovative design and technology.
The adaptability coupled with the ability to customize them to fit the user’s unique needs, translates into a higher degree of precision and control for the user, enabling them to perform both routine and specialized tasks with effectiveness.
Challenges and Limitations

Despite numerous benefits and advancements, we must acknowledge the challenges involved in refining robotic finger prosthetics. From the high cost and accessibility issues to durability concerns and adaptability constraints, these devices have their fair share of limitations.
The intimidating cost of these prosthetic devices, fueled by replacement parts, extensive R&D, and the application of advanced technology, can pose a significant hindrance for many. Furthermore, durability concerns and the need for regular maintenance can also make these devices less appealing to potential users.
Cost and Accessibility
The high cost of robotic finger prosthetics can be a significant barrier for many individuals. Depending on the complexity and functionality of the device, the cost can range from $7,000 to $100,000. This high cost can limit accessibility for many individuals who could benefit from these devices.
While insurance plans and funding options are available to cover the expenses related to these prosthetics, the financial barriers can still be significant for many individuals. As we move forward, efforts should be made to make these life-changing prosthetics more accessible to all individuals who could benefit from them.
Durability and Maintenance
Concerns about durability and maintenance can also deter the widespread adoption of robotic finger prosthetics. Users may be hesitant to invest in a device that requires frequent repairs or replacements. The longevity of these prosthetics is influenced by a variety of factors, including user acceptability, anthropomorphic design, and the quality of materials used in the construction of the prosthetics.
Regular maintenance is essential to ensure the longevity of the prosthetic fingers. This includes:
- Inspection for loose components
- Monitoring of operational sounds for changes
- Regular cleaning
- Examination for any damage or wear
- Verification of the proper alignment and fit of the prosthetic.
As advancements continue in this field, there should be an emphasis on enhancing these devices’ durability and educating users about proper maintenance practices.
Adaptability and Customization
Ensuring that robotic finger prosthetics meet each user’s unique needs necessitates adaptability and customization. However, achieving this level of personalization can be challenging. From the requirement for sophisticated solutions for dexterity and sensorization to addressing the principal design criteria for adaptability and customization, the obstacles are numerous.
Despite these challenges, strides are being made in this area. Some of the advancements include:
- Tailoring robotic finger prosthetics for individual users through the use of machine learning techniques for myoelectric control
- Employing CAD models for scaling
- Integrating individual finger control and automation to achieve precise control of the prosthetic
These advancements are helping to improve the functionality and usability of robotic finger prosthetics.
Future Developments in Robotic Finger Prosthetics
Looking ahead, the scope for further advancements in robotic finger prosthetics is immense. From the integration of sensory feedback systems to wireless communication and control, and enhanced machine learning algorithms, the future holds the promise of more intuitive and natural movement for users of these devices.
Emerging technologies like sensory feedback integration systems, wireless communication protocols, and machine learning algorithms hold the potential to considerably boost the performance of these prosthetics. By improving peak finger velocity, enabling a sense of touch, and adapting to the user’s intended movements, these advancements could usher in a new era of prosthetics that better replicate natural hand movements.
Sensory Feedback Integration
Sensory feedback integration in robotic finger prosthetics could provide users with a more natural and immersive experience. By offering:
- haptic sensations
- proprioceptive sensations
- thermal sensations
- pain sensations
These systems could significantly improve the functionality of the prosthetics, enhance the user’s body image, facilitate social interactions, and reinstate the sense of ownership and integration of the prosthesis as a part of the user’s body.
The integration of sensory feedback can provide a more natural and intuitive experience for the user. This includes the use of haptic devices that utilize different sensory modalities such as vibration, stretch, and pressure, and non-invasive sensory feedback systems that transfer somatotopical sensory information. This integration of sensory feedback could significantly enhance the user’s ability to perform various tasks with the prosthetic fingers.
Wireless Communication and Control
Wireless communication and control technologies could enable:
- More seamless and intuitive control of robotic finger prosthetics
- Transmission of signals from sensors or muscle grafts to the prosthetic hand
- Streamlining prosthesis operation
- Improving the overall user experience.
Wireless communication protocols like Bluetooth are already being employed in the function of robotic finger prosthetics. As we continue to advance in this field, we could see the increased use of wireless technologies to control these devices, reducing the need for cumbersome wires and external devices.
Enhanced Machine Learning Algorithms
Machine learning algorithms hold great promise for the future of robotic finger prosthetics. By identifying specific muscle activation patterns and improving control accuracy and speed, these algorithms can significantly enhance the performance of these devices.
Moreover, machine learning algorithms can adapt to the user’s intended movements, providing an artificial sense of touch. This adaptability can result in a more natural and organic utilization of the prosthesis, closely replicating natural limb movements. As we continue to innovate in this field, we can expect to see even more advanced algorithms that can further improve the adaptability and accuracy of prosthetic fingers.
Summary
Robotic finger prosthetics is a testament to human ingenuity and resilience. Through relentless innovation and a growing understanding of human anatomy and biomechanics, we have been able to develop prosthetics that not only replicate the form of the human hand but also restore some of its function. Despite the challenges, the potential for further advancements is vast. As long as we continue to push the boundaries of what’s possible, the future holds the promise of even more intuitive and natural movement for users of these remarkable devices.
Frequently Asked Questions
How much would a prosthetic finger cost?
A prosthetic finger can cost anywhere from $2,000 to $20,000, depending on the type and level of functionality.
Are there prosthetics for missing fingers?
Yes, there are prosthetics specifically designed for finger loss, such as those offered by Naked Prosthetics. These prosthetic devices aim to provide functional and high-quality solutions for individuals with missing fingers.
How much does a finger implant cost?
A finger joint replacement with arthroplasty can range from $10,000 to $12,000, and may be covered by insurance plans based on doctor recommendation.
Can you get bionic fingers?
Yes, you can get bionic fingers through a new bionic hand innovation developed by surgeons and engineers, allowing users to control each finger as though it was their own body. This breakthrough could revolutionize prosthetic limb design and usage.
How much is a robotic prosthetic hand?
A functional bionic prosthetic arm can cost anywhere from $20,000 to $80,000 due to the separation of manufacturing of its components.








Leave a Reply
You must be logged in to post a comment.